目的
我が家では、水槽を使って熱帯魚やエビを育てるアクアリウムを行っております。完全な趣味の水槽なので、中身は得にきれいではないですが、日々魚やエビをみて癒されております。
アクアリウムを行う上で、水の入替は一種の習慣的なものになります。今まで水の入替は、サイフォンの原理を用いてバケツに汚れた水を入れて捨て、ペットボトルに溜めた水をそのまま水槽に入れて行っておりました。特に問題はなかったのですが、この水を水槽に入れるのがめんどくさくなったので、自動化出来ないかと考えて今回自動化装置の製作を考えました。
次項より今回製作したシステムに関して説明させて頂きます。
自動給水システム仕様
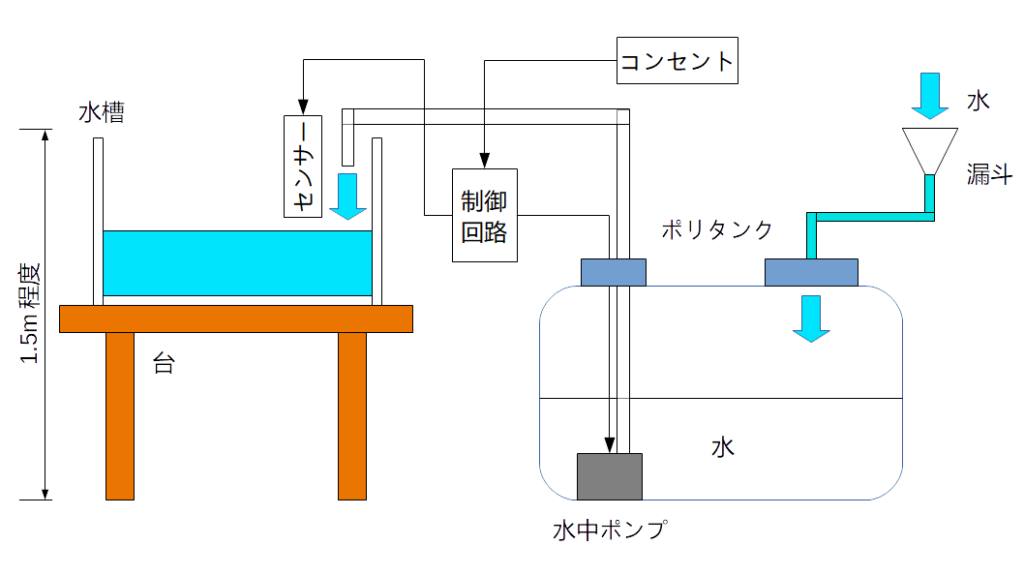
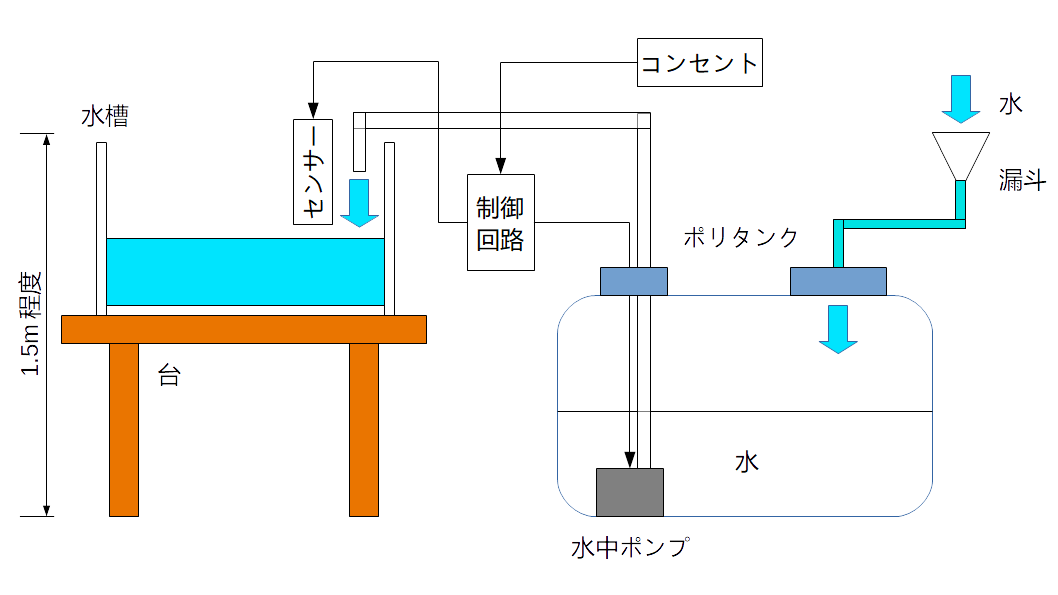
自動給水システムの外観図は図1の通りになっており、材料は下記の通りになります。
- 漏斗+ホース
- 水を溜めるポリタンク
- 水中ポンプ
- 制御回路
- 水位センサー
自動給水システムの動作の流れとしては下記の通りで考えております。
- 漏斗とホースを用いて水道から水をポリタンクに入れる。(ここは自分で行う。)
- ポリタンク内に水をしばらく置いておき、水道水内部の塩素を抜く(カルキ抜き)
- 水槽内に水位センサーを設置し、水位が下がったらセンサーが反応するようにセンサーを取り付ける。
- センサーが応答したら、水中ポンプをONにしてポリタンク内の水を水槽に流し込み、水位が元に戻ったら、水中ポンプをOFFにする。
上記の動作をすることでセンサーの位置で水が維持されるシステムが完成します。これにより、水槽への足し水動作をしなくてもよくなります。
基本的な構成は上記の通りになりますが、そのままこれで運用すると、ポリタンクの中に水がなくて水槽にも水がなくなった場合、ポンプが動作し続けてオーバーヒートになり故障する可能性があります。そうならない為にインターロック(非常停止)を別で考えます。今回はプログラムでIL動作をさせる事にしました。プログラムに関しては別項で詳細を説明致します。
次にメインで使用する材料について説明致します。
メイン材料
自動給水システムでメインで使用する材料は
- 水中ポンプ
- 制御回路
- 水位センサー
になります。
各々を説明すると、書きの通りになります。
水中ポンプ
今回使用する水中ポンプは下記のリンク先の通りになります。今回はアマゾンで購入致しました。
仕様としては、下記の通りになります。
- 電源 : DC12V,3W駆動
- 揚程(水が持ち上がる高さ) : 1.5m
- 色:ブラック
- 材質:プラスチック
揚程は水が持ち上がる高さであるので、必ずポンプと水槽の高さを確認したほうが良いです。他にも小型ポンプで揚程3mとかもあるので、そうゆうのを使用しても良さそうです。
制御回路
制御回路はラズベリーパイといったマイコンを使ってシステムを作ろうと思っております。
ラズベリーパイは最近流行っているARMプロセッサを使用したシングルボードコンピュータの事であり、イギリスのラズベリーパイ財団によって開発されているものになります。日本語では良くラズパイと呼ばれております。(Wiki引用)
このようなマイコンにはPICヤAVRなどがありますが、PICやマイコンはプログラムを書き込むのに専用のプログラムライターが必要なのに対し、このラズベリーパイは自分でキーボードやマウスを繋いで直接プログラムを打ち込んだり、別にパソコンに繋いでプログラムする事で動かせるので、以前に比べて非常にとっかかりやすい事が特徴の一つであります。
これを使っていろいろなものを制御する事が出来ます。下記に外観を載せます。

最近流行りだと、IOT(Internet On Things)に絡んだ下記のようなものを作るのに使っていたりするらしいです。
- 植木鉢の土が乾いたら自動で給水する装置
- サーボモータを使った遠隔鍵閉め装置
- Wi-fi経由のラジコンの制御装置
このラズベリーパイにも種類があり、今の所出ているもので下記のものがあると思われます。
- ラズベリーパイ
- ラズベリーパイゼロ
- ラズベリーパイピコ
ラズベリーパイはこのようにいろいろなものを作ることが出来、安いものだと1000円以下で購入出来る(ラズベリーパイピコ等)といった利点があるので最近流行っているそうです。
今回のシステムでは安いこともあってラズベリーパイピコを用いて制御システムを作ります。ラズベリーパイピコの外観は下記の通りになります。
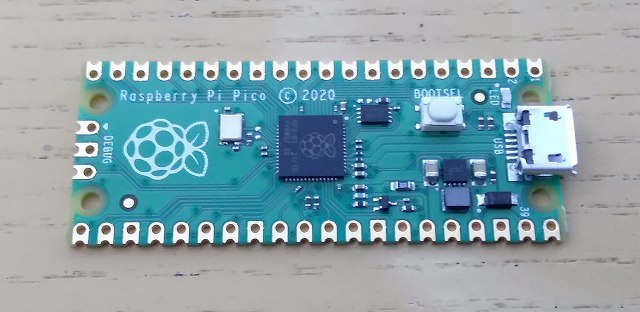
ラズベリーパイピコは縦21mm x 横52mm程度の大きさのマイコンであり、I/O(Input信号/Output信号)は下図のようになります。
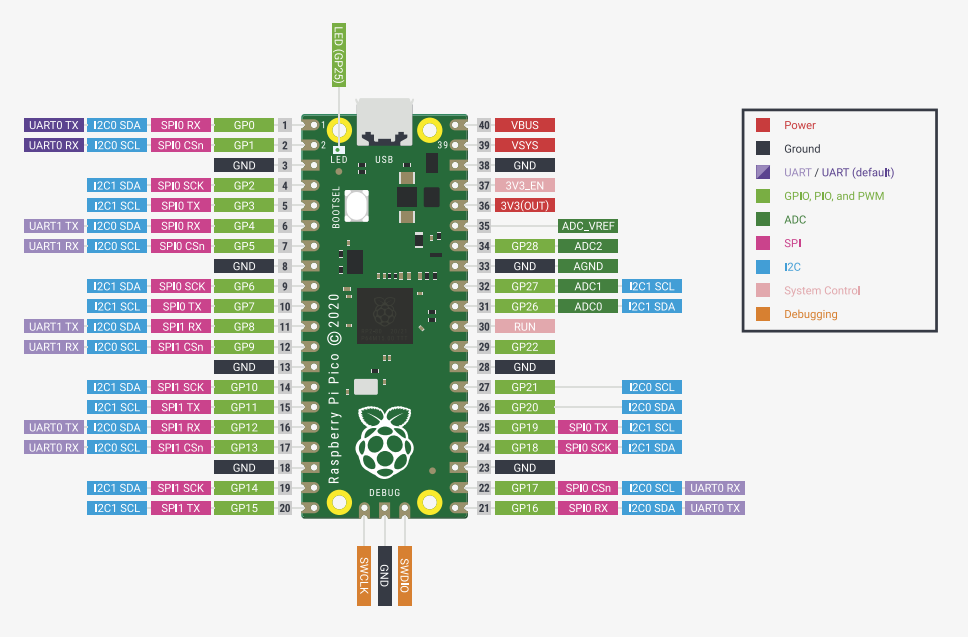
こちらの画像は秋月電子さんの部品購入欄に記載しているpdfから引用しております。https://akizukidenshi.com/download/ds/raspberry/pico-datasheet.pdf
上図だとSPIやUART等いろいろと通信信号が書いている為、これもう少し見やすくして、
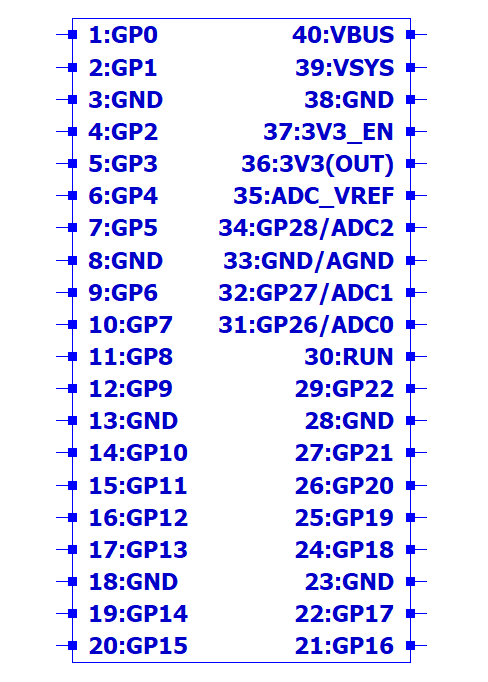
と上記のようになります。
本システムでは、このマイコンを用いて制御回路を作成致します。
水位センサー
最後に水位センサーに関して説明致します。
今回購入して使用したのはUncellの水位センサーといったものになります。(水位センサー)
外観図及び仕様は下記の通りになります。

- 最大接触定格 : 10W
- 最大スイッチ電圧定格 : 100V
- 最大スイッチ電流定格 : 0.5A
- 最大接触抵抗 : 0.1Ω
- フロートボール素材 : P.P(おそらくポリプロピレン)
- フロートボディ材質 : プラスチック
- フロートボールサイズ : 19mm 16.5mm(D*H)
- ねじ径 : 7.2mm
- 固定クリップ径 : 12.8mm
- 本体全長 : 46mm
- ワイヤー長さ : 36mm
- 重量 : 19g
以上の材料を持って製作致します。




コメント